Steps
-
Step 1
Planning
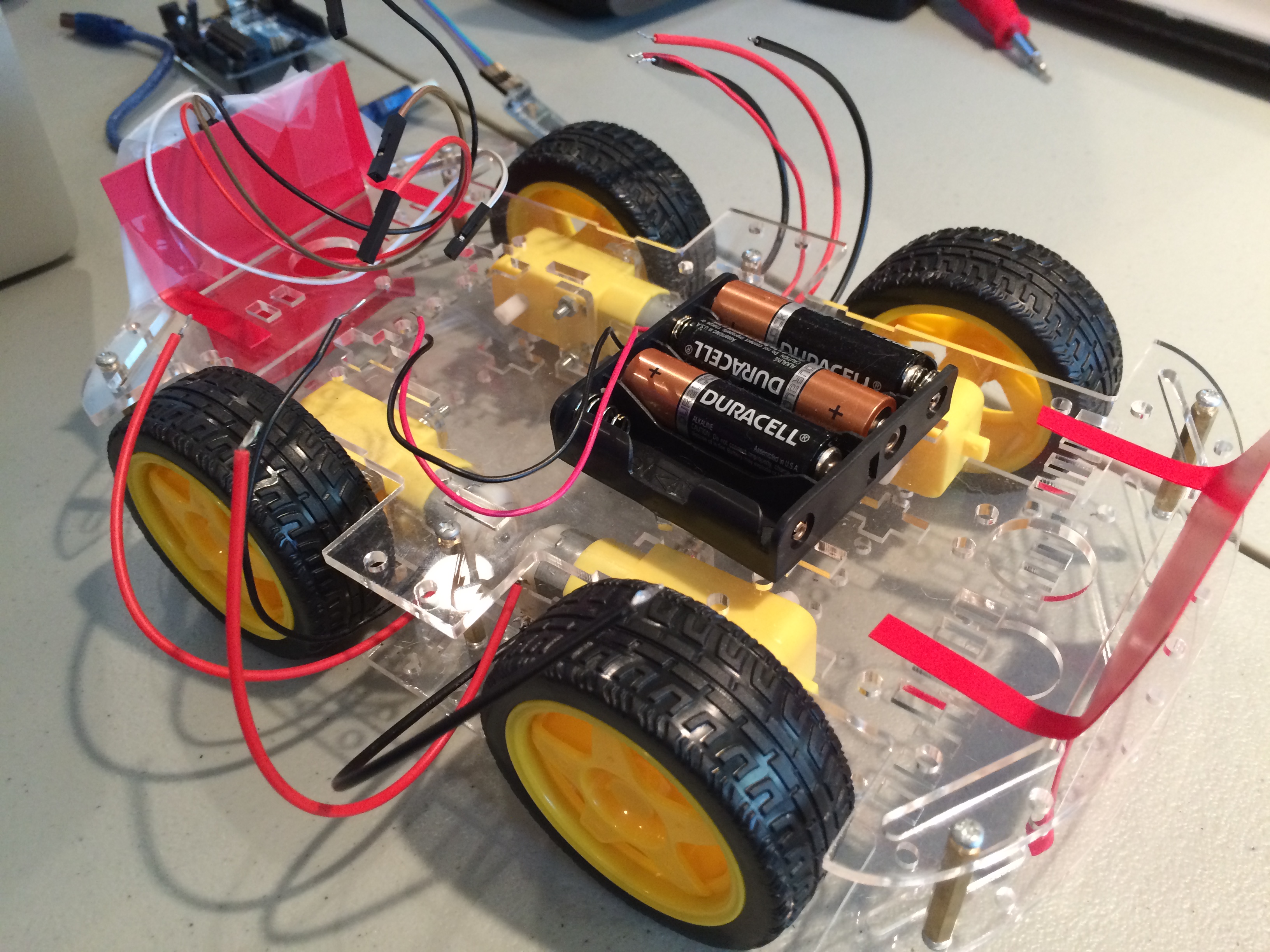
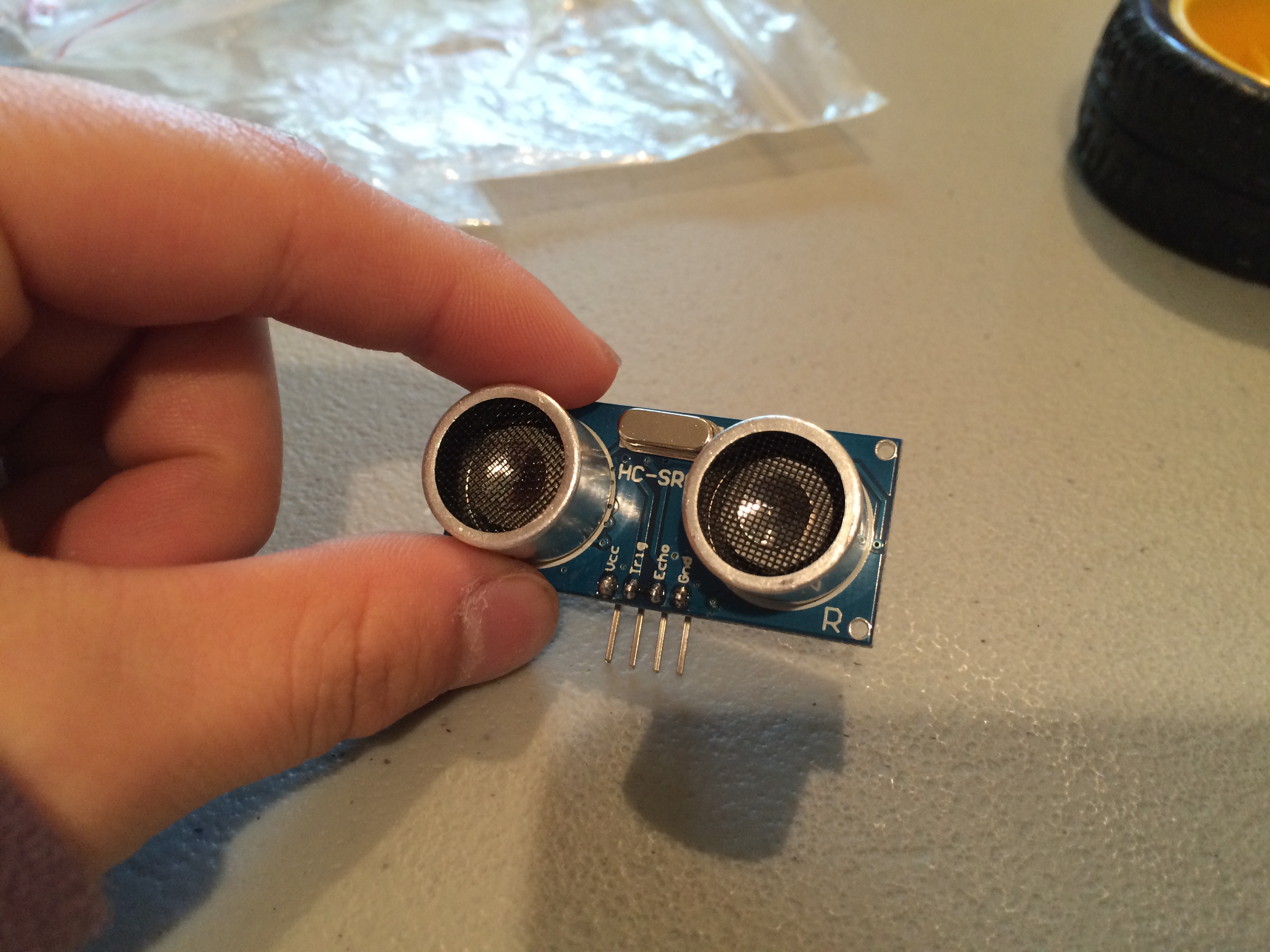
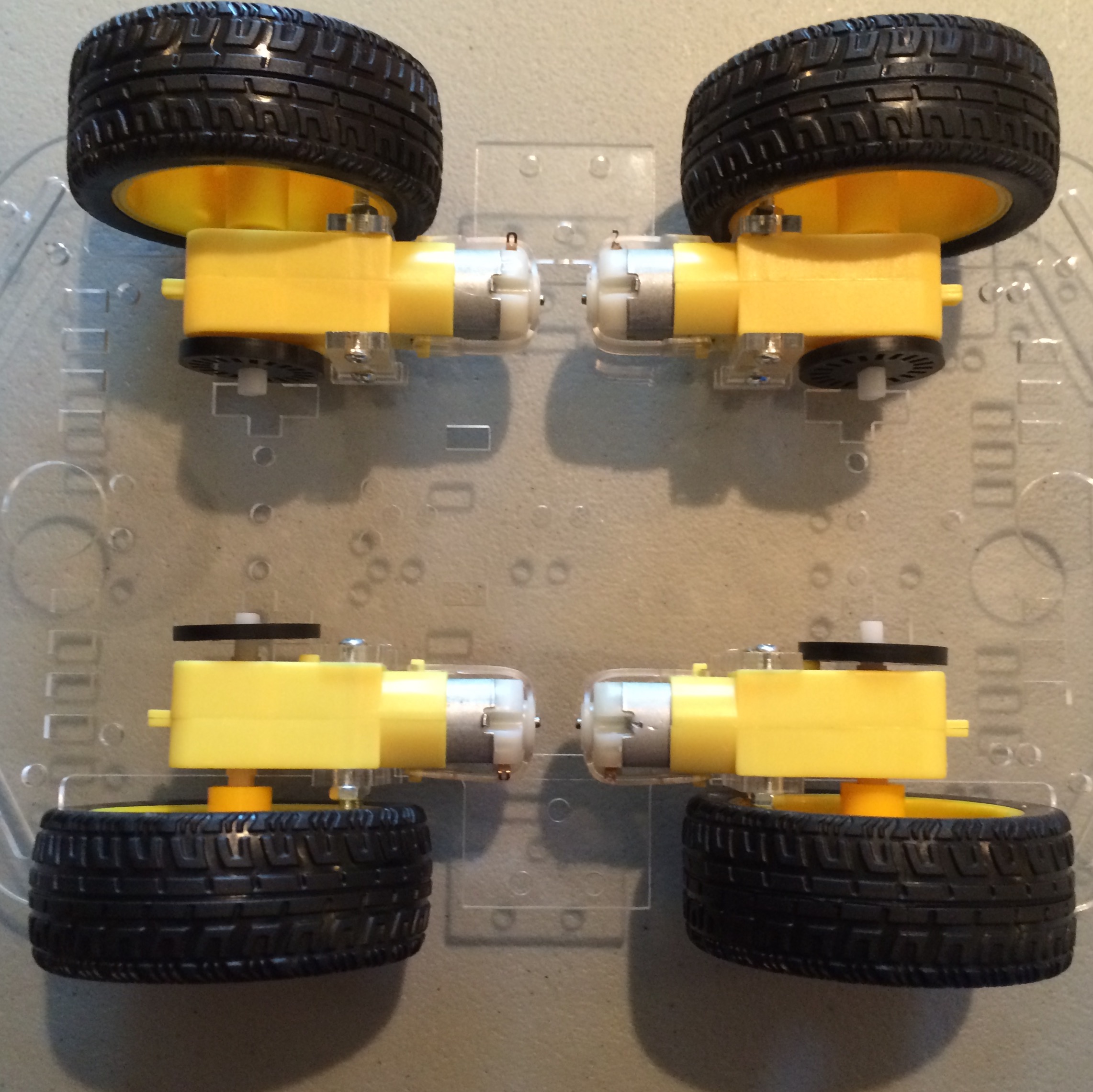
Our plan was to make a car with automatic turns and the ability to be controlled via bluetooth. We decided to use this arduino car that was specifically built to be arduino compatible and came with four motors. After, used specific shields, such as the bluetooth shield and the motor shield.
-
Step 2
Building
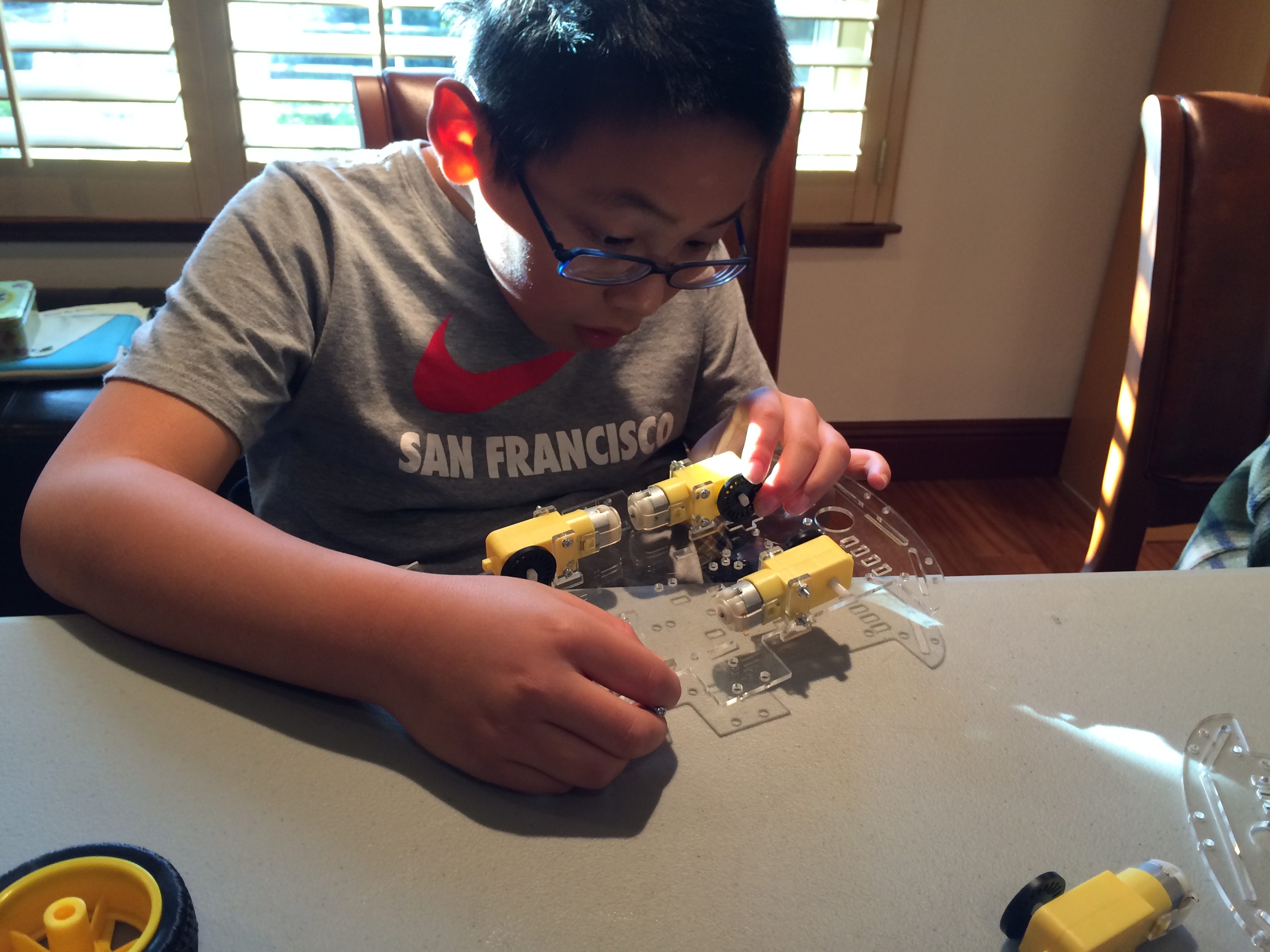
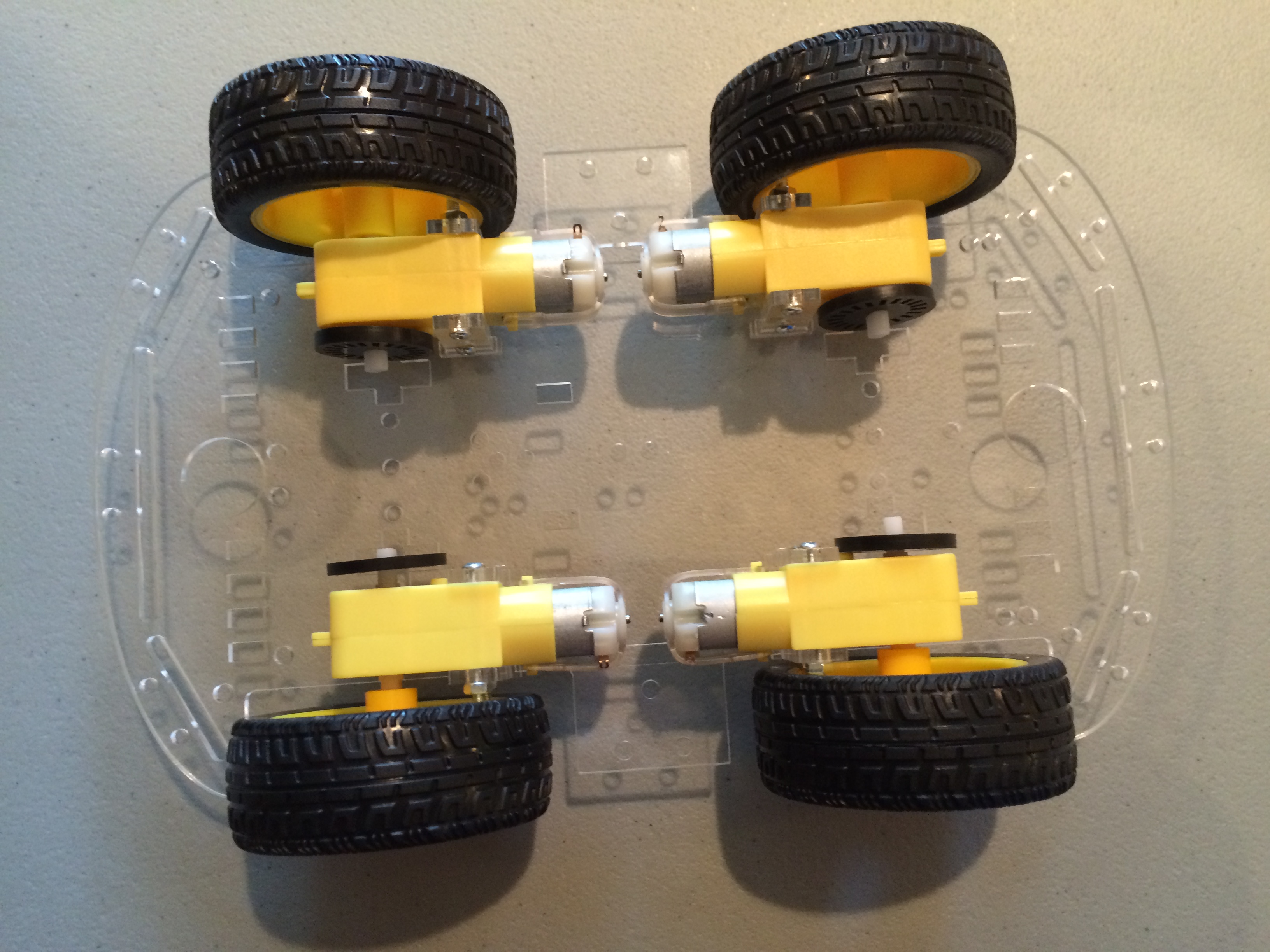
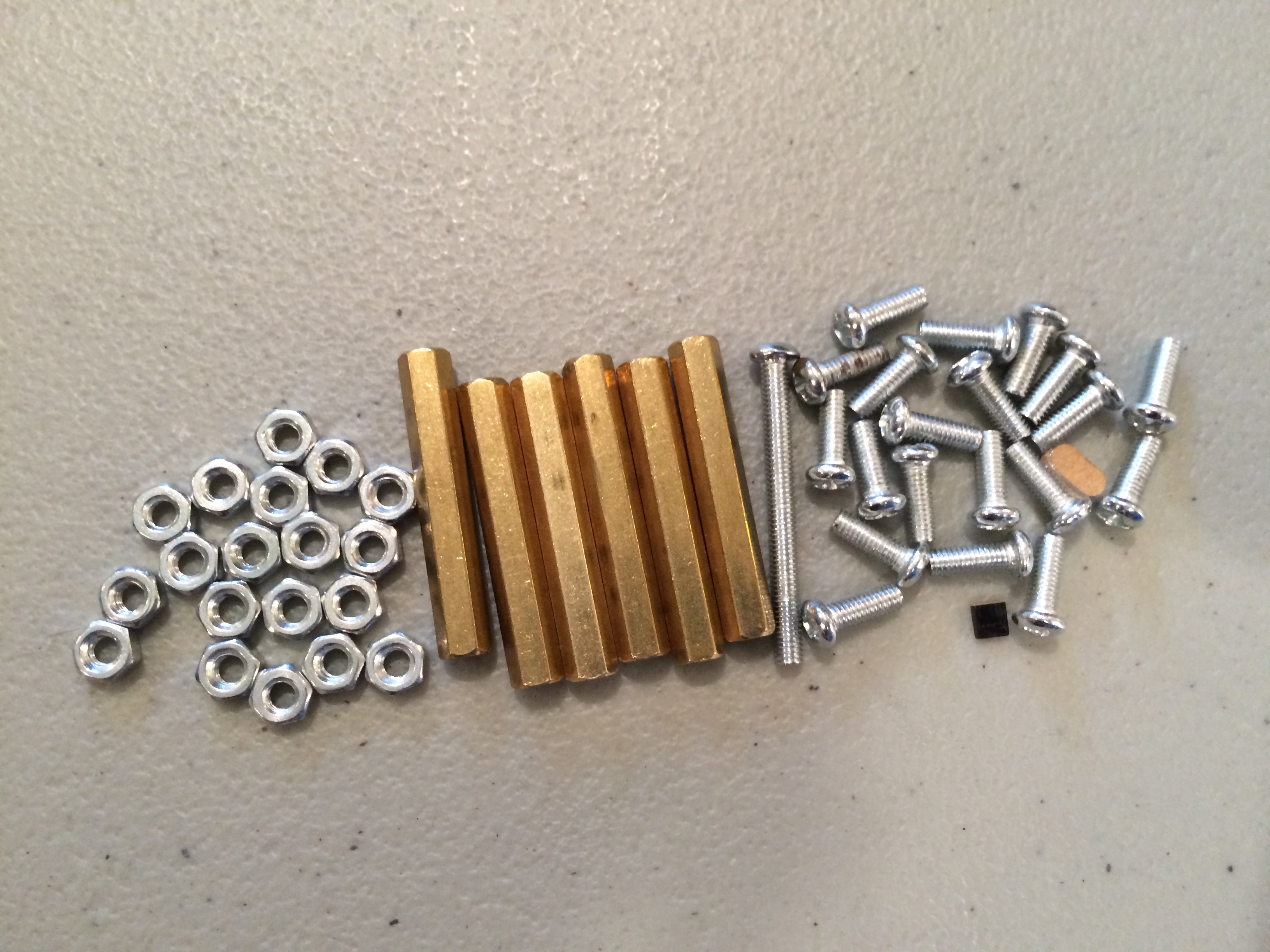
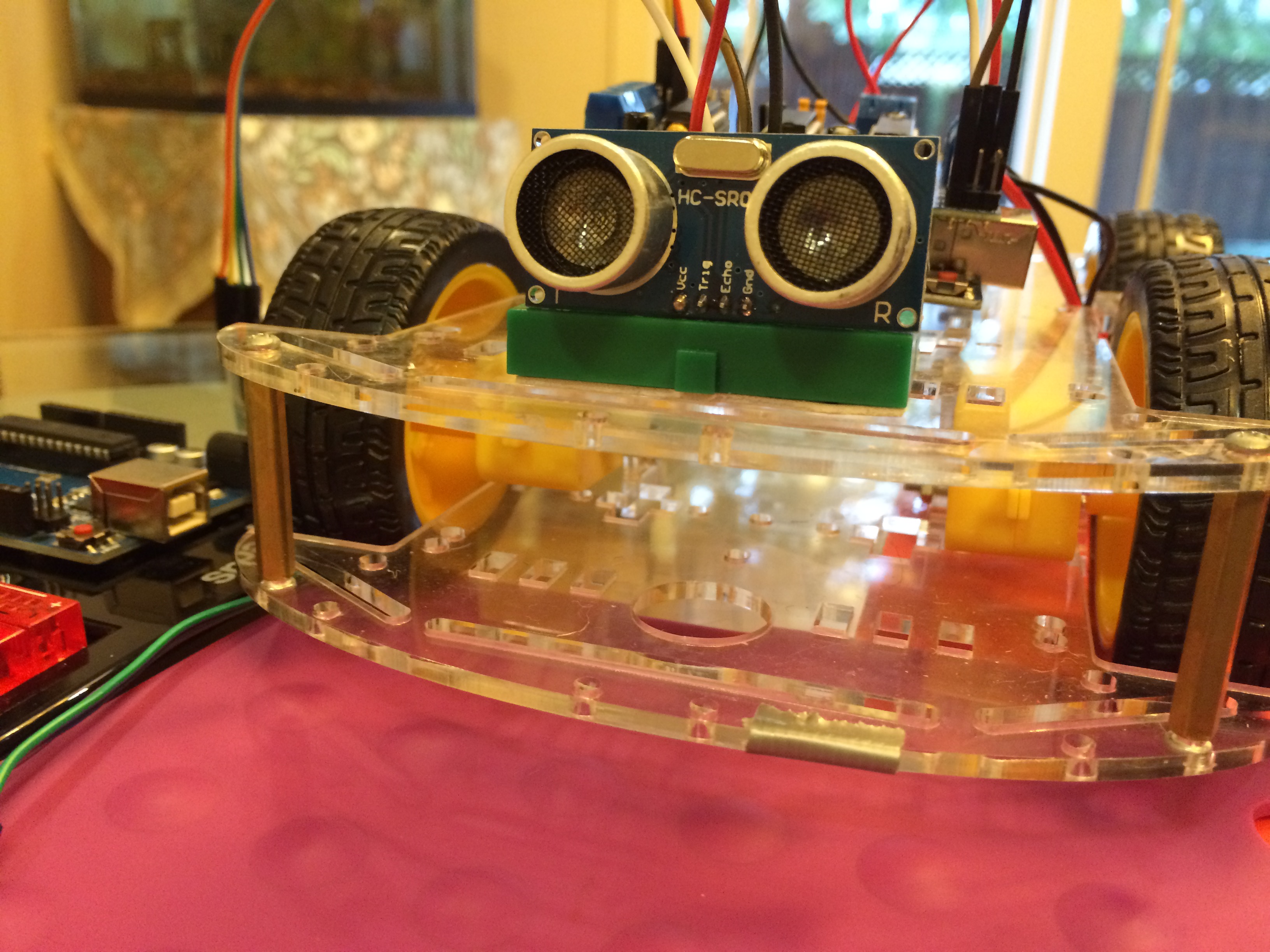
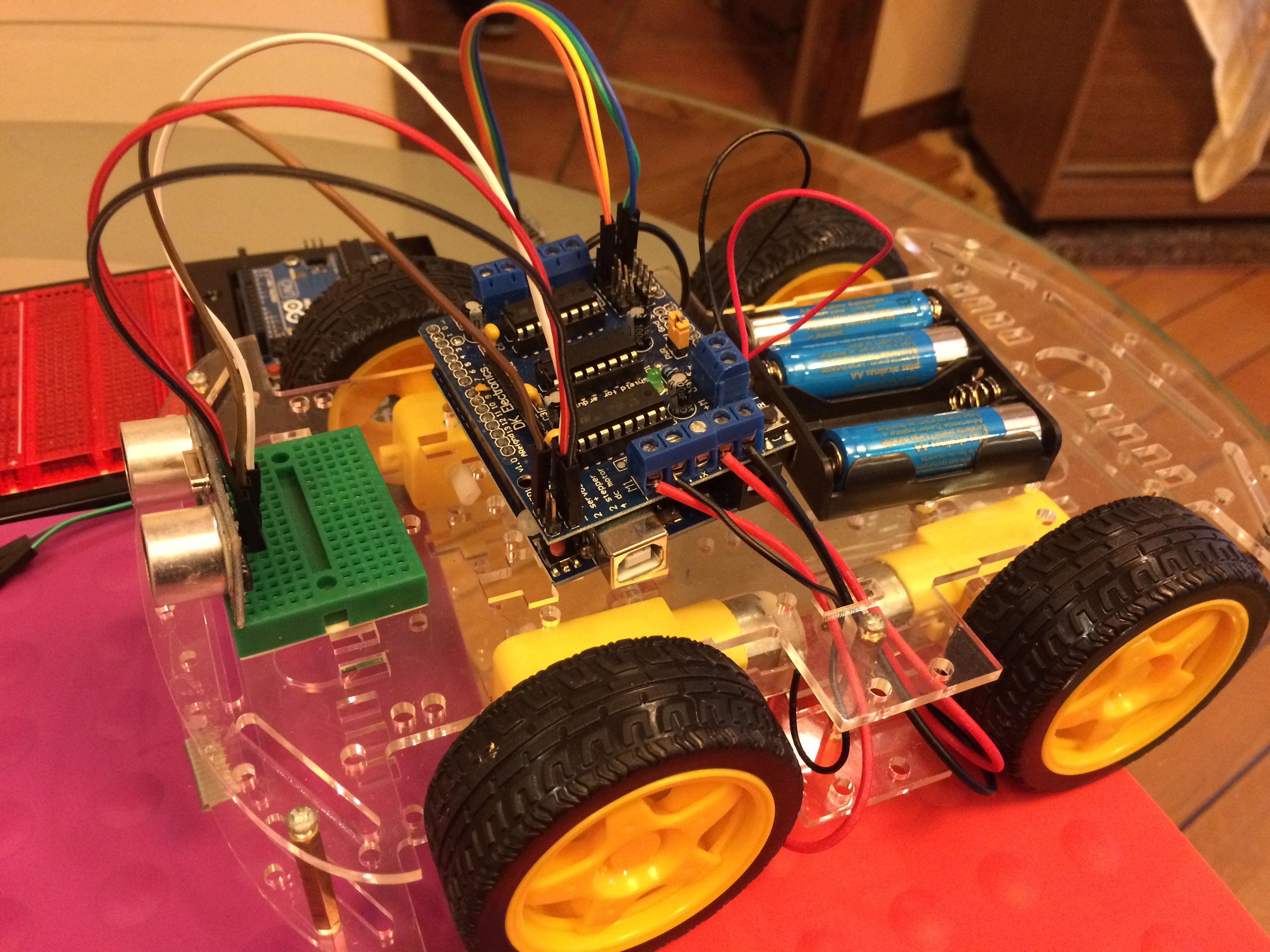
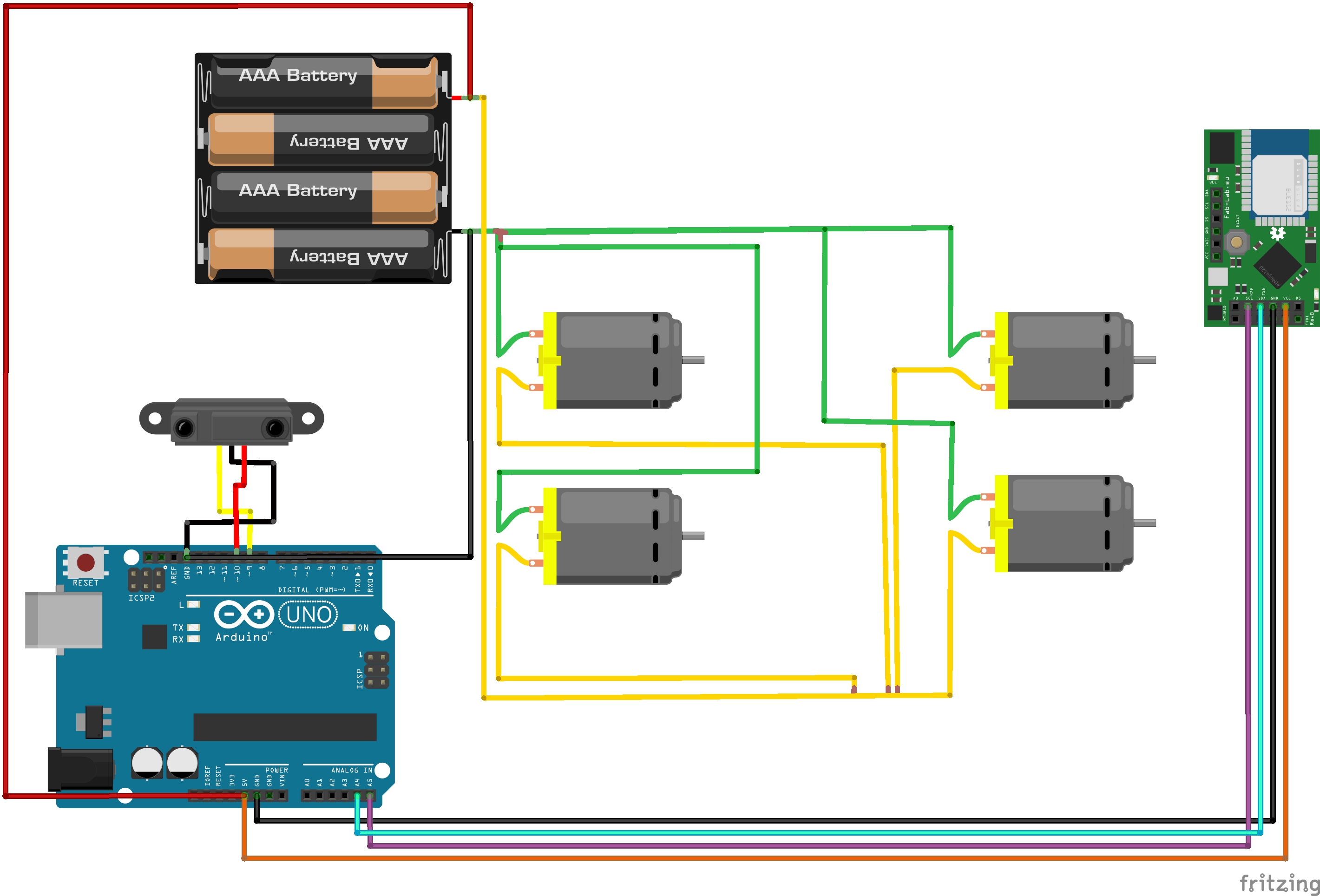
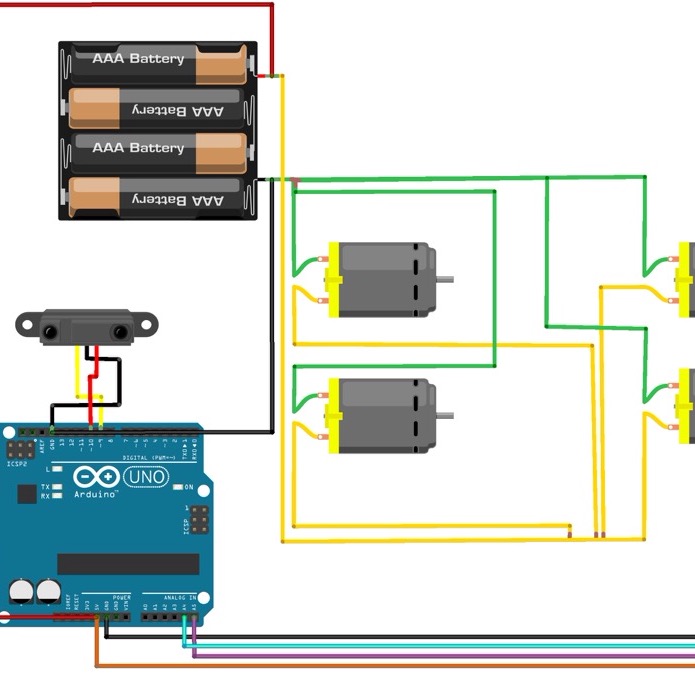
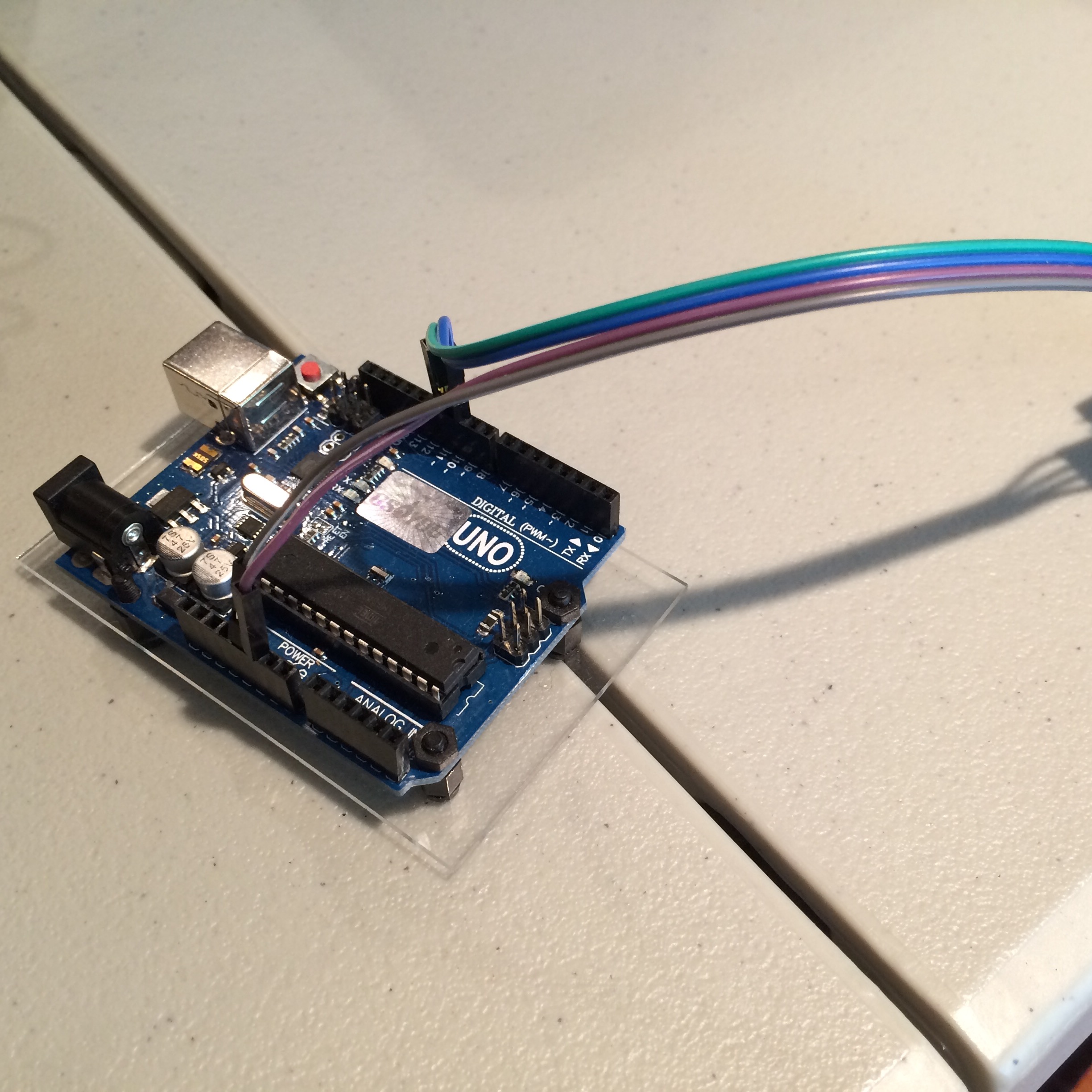
The arduino car came with a set of instructions and the materials to make. Yi Ying was in charge of the building. He also connected the motors to the motorshield and arduino.
-
Step 3
Programming
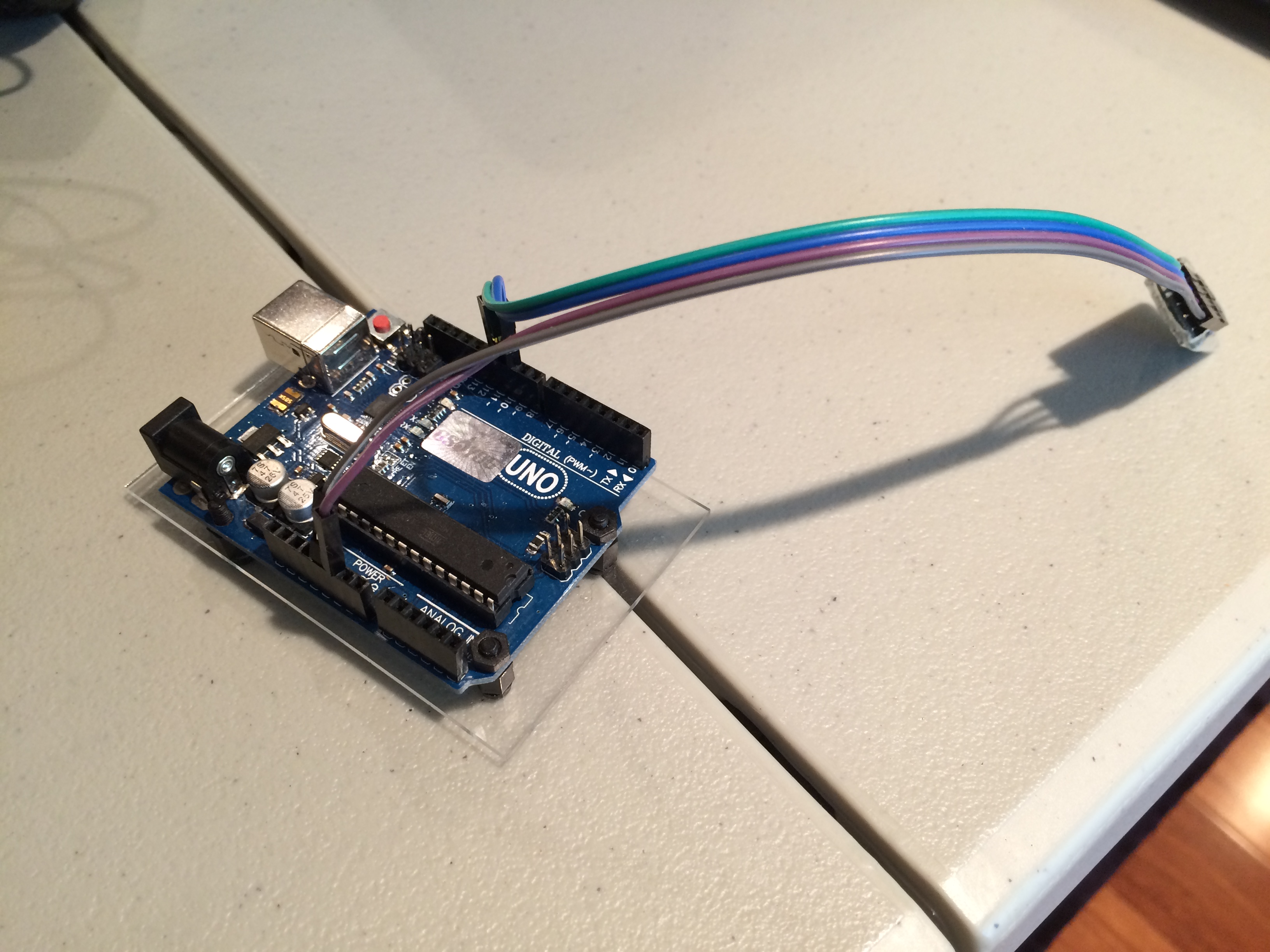
Since we used an arduino board, we used the arduino software to write out the code. Addison programmed the arduino, including the features such as the turning and bluetooth controlling.
-
Step 4
Sharing
We're done with the building! Now with all the features integrated, our amazing car is ready to be shared! Emily created this page and Jack did a presentation. Check it out!
-
Thanks
For
Coming!